-
ものづくりAI/IoT展(2023)

Argoculus活用に先駆けた基礎研究を紹介します。
はじめに
熱狂的とも思われたIoTへの関心は落ち着いて来ました。新技術が定着するプロセスの一つですが、IoTには固有の難しさがある事も事実です。難しさは様々ありますが、以下の課題は当社で対応可能と位置付け、解消に向けて取り組んでいます。① 技術的に困難
IoTシステムを構築するためには、IT技術、対象設備機械等・センサーに関する技術、対象設備機械等の運用技術が必要です。このような多岐に渡る技術を揃える事は容易では無く、またITとしては高度な技術が必要です。
② データの価値化が容易では無い
IoTシステムを導入すればデータ収集、蓄積、可視化が可能になります。しかし、データを活用して充分な付加価値が得られる事が不可避です。
課題①に対しては、非IT技術者でもIoTシステムを構築できる事を目標にIoTプラットフォーム:Argoculusを開発し市場に投入しているだけでなく、社内でのシステム構築の合理化に活用しています。例えば、アナログ信号に対してはプログラミングレスでIoTシステムを構築可能です。ダッシュボードはドラック&ドロップで制作でき、標準的なデータ分析は組込済み、データ監視機能はスクリプトで設定できます。これまでホームページでご紹介した事例は非IT技術者が中心になり短時間で開発したものです。IT技術者、特にIoTに必要とされる高度IT技術者が払底している現状で、Argoculusの存在価値は大きい事を実感しています。Argoculusを利用しても高度IT技術が必要な場合はありますが、高度IT技術者の作業量を大幅に減らす事ができます。最近、Argoculusの契約や引合いが増えてきました。9月には新バージョンもリリースします、是非活用をご検討下さい。
課題②については取得したデータを利用者にとって価値ある情報提供や関連機能を実装し、実務の質や効率を向上させる事が必要です。当社もビッグデータ解析やAI活用には携わっています。しかし、個別の解析作業なので必然的に高額になるので利用者は大企業に限定されます。一方、中小製造業の人手不足、熟練者不足は極めて深刻です。中小製造業の資金力でも導入できるような安価で簡単ではあるけれど、人手不足・熟練者不足に応える事ができる装置・システムを提供する事が今求められている事の筈です。
この趣旨の活動の一つとして、当社はロータリー型真空ポンプの振動計測・分析を行っています。先日この成果の一部を日本設備管理学会春季大会(2021年、6月14日、オンライン形式)で、「ロータリー真空ポンプを対象とするMEMS振動センサー計測データ分析に基づくポンプ 負荷・稼動状態を特定する指標」を発表しました。新概念のIoT提案を込めた長いタイトルですが、以下に紹介します。
計測対象
本研究は日本設備管理学会の「無線振動センサーを用いた設備の状態監視に関する研究会」(主査:中山慎司、委員:荒川雅裕)の活動の一つとして、中日本炉工業(株)と当社が実施中の研究です。同社の場合、熟練者が多いのでポンプは適切な条件で運転され、整備状態も良好です。また、ポンプに異常が発生した場合には、これに気づき適当な対処をしているので、ドカ停発生はありません。しかし、熟練者が不在で運用されているポンプは多くあります。ポンプの運転条件も整備条件も完全とは言えず、またポンプに異常が発生してもこれを検知・対処できるとは限りません。この結果、ドカ停が発生し生産に大きな影響を与えます。本研究の目的は熟練者が不在でもロータリーポンプを適切に管理・運用し、ドカ停を防止できる安価・簡単な装置・システムの開発です。すなわち、遠隔計測・監視装置とは異なる目標です。回転機器の異常診断に対し振動計測・分析は歴史も古く強力な手法です。ただ、振動を計測する事および分析する事、共に熟練と深い知識が必要です。非熟練者が機器にセンサーを取り付けても、意味のあるデータを取得する事は困難です。しかし、1KHz以下程度の周波数領域ならば、比較的簡単に正確な計測ができます。中山水熱工業(株)が、この周波数帯に感度を持つMEMSセンサー:コナンエアを市場投入し、前記研究会メンバに提供したて頂いたものを利用しました(ポンプの軸受部にマグネットで固定)。コナンエアは指定時刻に10秒間の振動計測を行い、加速度、速度関連データおよびフーリエ解析まで行う機能を持ち、Wi-Fiによりデータ出力する機能があります。今回は、1時間に一度の計測とし、定期的にデータを取得し分析に利用しました。なお、本解析では加速度rms、速度rms、およびフーリエ解析結果を利用しました。
目標としている「安価・簡単でドカ停防止を目的としたシステム」を実現するためには、センサー類やエッジの取付けを簡単に実行できる事は要件の一つです。例えば、センサーやエッジを顧客に送付し、これ等を顧客様に取り付けて頂ける事により価格削減が可能になります。このような製品コンセプトの実現性は確認済みです。
データ分析
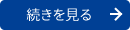
本研究では2019年11月〜2020年11月迄の13カ月間に取得した2,650ケの振動データを対象としています(ポンプ停止時他のデータは除外)。図1に代表的なフーリエ分析結果を9ケ示します。
図1 典型的なスペクトル解析結果
図にあるように、フーリエ解析結果は多様ですが、多くの場合は図1の左上に示すように低周波域にだけピークを持つ比較的単純な結果でした。しかし、場合によっては数百Hz以上の部分に複雑なピークを持つ事例も発生します(例えば、図1の右下に示すデータ)。また、全てフーリエ解析結果で軸回転数の2倍に相当する周波数に明確なピークが存在する事が解ったので、このピークの位置から軸回転数を特定し、以下の分析に利用しました。今回分析では、軸回転数はグラフから読み取りましたが、狭い周波数範囲のピーク位置を決めるだけなので自動化は容易です。
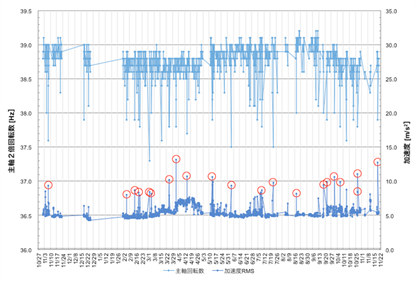
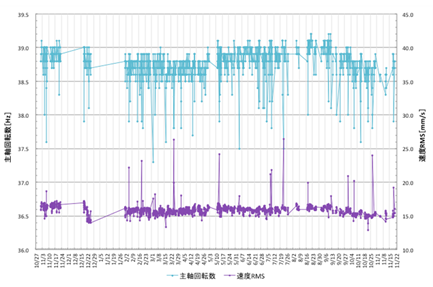
軸回転数は、ポンプ駆動源である誘導モータの負荷状態の指標です。この事を念頭に置き、軸回転数、加速度rms、速度rmsの経時変化をグラフ化したものが図2、および図3です。
|
|
|
図2 軸回転数と加速度rms |
図3 軸回転数と速度rms |
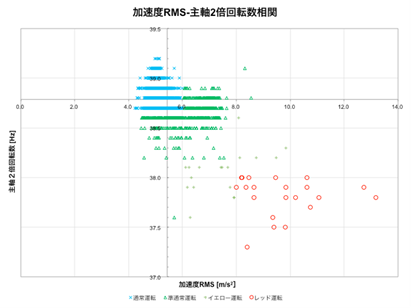
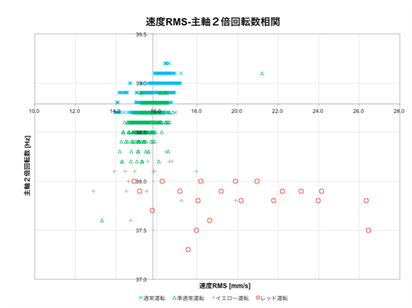
図を見ると、大部分の計測結果では、加速度rms、および速度rmsの値は概ね一定範囲内にありますが、時々飛び抜けて大きな数値になる事があります。また、加速度rms、速度rmsが飛び抜けて大きくなる時、軸回転数が大きく低下する傾向が解ります。この点を詳細に検討するため、軸回転数と加速度rms、および軸回転数と速度rmsの相関をグラフ化したものが図4、および図5です。大部分の計測事例では軸回転数と加速度rmsの間には負の相関、軸回転数と速度rmsの間には正の相関が存在しますが、軸回転数が大きく低下した場合には上記の相関が消えている事が解ります。
|
|
|
図4 軸回転数と加速度rms相関 |
図5 軸回転数と速度rms相関 |
説明は省略しますが、上に記した正の相関と負の相関は技術的にみて妥当な相関です。一方、軸回転数がある程度以下まで低下した場合に、この相関が消失した事は振動発生のメカニズムが変化した事を意味する筈です。ここでは、振動発生のメカニズムが消失した運転を「レッド運転」と仮称します。また振動メカニズムが正常な運転であっても、回転数が高くand加速度rmsが低めの場合を「通常運転」、回転数が低めand/or加速度rmsが高めの場合を「準通常運転」と名付けました。すなわち、軸回転数と加速度rmsにより運転状態を区分したわけですが、この方法でレッド運転と定義された運転区分では、軸回転数と速度rmsの間の妥当な相関も消失しています。