Electromagnetic field analysis software

Electromagnetic field analysis software
DC-field eddy current analysis method
- TOP >
- Analysis Examples by Functions (List) >
- DC-field eddy current analysis method
Summary
In this section, we discuss the equations in a conductor in constant motion.
Explanation
The equations for the other regions are exactly the same as in conventional static magnetic field analysis and are also handled in the same way. The
The constitutive equation for a conductor in motion is expressed, as usual, by the following relationship where
Substituting equations (1), (2), and (3) into the following ampere law and current conservation equation,
then, the following governing equations to be solved are derived
In DC-filed eddy current analysis, the upwind difference is taken for the time derivative in equation (7). Suppose that the finite element mesh is equally divided in the direction of motion as shown in Fig. 1. In the case of rotational motion, equal angle division is assumed. The unknown variables for
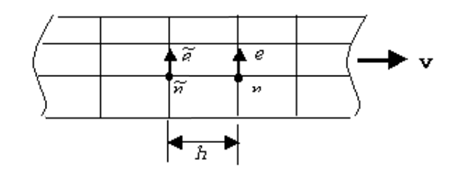
Fig.1 Element partitioning of a motion conductor
In this case, the upwind time difference is expressed as follows:
where
(1)A法
(2)A-Φ法
(3)A-φ法
The biconjugate gradient method with incomplete Cholesky decomposition (ILU Bi-CG method, ILU Bi-CGSTAB method, and ILU GPBi-CG method) is introduced as an asymmetric matrix solving method. Although the ILU GPBi-CG method seems to converge relatively well, the convergence is considerably less good than the conventional eddy current analysis using symmetric matrices. In particular, it may not converge when the elements are flattened.
Periodic boundary conditions are used in DC-field eddy current analysis. Periodic symmetry or periodic antisymmetry conditions can be used for linear or rotational motion. The mesh in the region where eddy currents are generated must be equally spaced in the direction of motion and equally angularly divided for rotational motion. The sliding method can also be used for this analysis. This allows transient analyses of linear and rotational motions to be performed using the results of the DC-field eddy current analysis as initial values. The method of execution is almost the same as the conventional method of using the static magnetic field analysis as the initial value. Nonlinear calculations can also be performed in the same way as in conventional static magnetic field analysis.
Analysis Examples by Functions
DC field current analysis
©2020 Science Solutions International Laboratory, Inc.
All Rights reserved.