Electromagnetic field analysis software

Electromagnetic field analysis software
Magnetization input to MAGNET by function
- TOP >
- Analysis Examples by Functions (List) >
- Magnetization input to MAGNET by function
Summary
EMSolution provides MAGNET as a finite element model of magnets. If the magnetization distribution of a magnet is not uniform, the magnet can be subdivided and a magnetization vector can be given for each property, or a magnetization vector can be given for each element. This section introduces the functions to set the magnetization distribution by inputting a sine function, which represents the magnetization distribution as a combination of sine waves, and by inputting a mathematical expression, which represents the magnetization distribution as a mathematical formula.
Explanation
There are two types of magnetization orientations subject to sinusoidal function input: radial orientation (radial direction in cylindrical coordinate system) for a ring magnet shown in Fig. 1 (a) and parallel orientation (any direction in Cartesian coordinate system) shown in (b). Mathematical input can be applied to any magnet geometry.

(a) Radial orientation

(b) Parallel orientation
Fig. 1 Ring magnet
The sine function input is described below. In the case of radial orientation in the cylindrical coordinate system shown in Fig. 1 (a), the radial (
where
As Example 1, we show an analysis of the model in Fig. 1 with a magnetization distribution set up. The calculation conditions are: reference magnetization
Fig. 2 shows the waveforms of the given magnetization
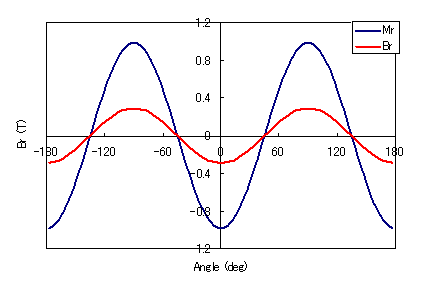
(i) Radial orientation
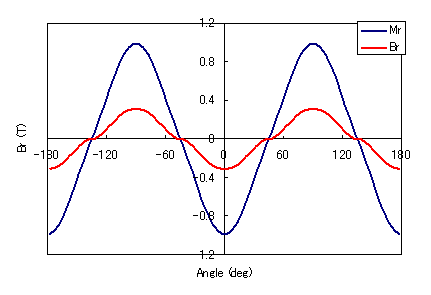
(ii) Parallel orientation
Fig. 2 Magnetization waveforms at the highest harmonic order
and magnetic flux density waveforms at the outer surface of the magnet

(i) Radial orientation
(ii) Parallel orientation
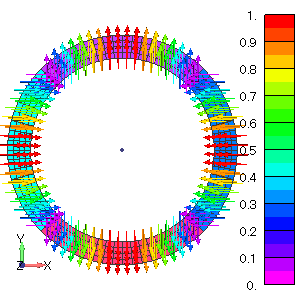
(a) Magnetization distribution (magnetization)
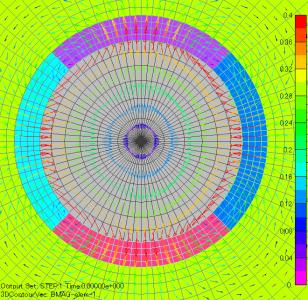
(i) Radial orientation

(ii) Parallel orientation
(b) Magnetic flux density distribution (magnetic)
Fig. 3 Magnetization and flux density distributions
for the highest harmonic order 1
Next, as Example 2, assume the radially oriented ring magnet model of Fig. 1(a) with
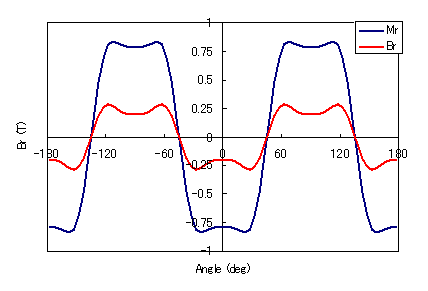
Fig. 4 Magnetization waveform of the 5th harmonic order
and magnetic flux density waveform
at the outer surface of the magnet
(radial orientation)
How to use
To give the magnetization distribution as a function input, set the INPUT_TYPE option in the MAGNET input field to 2: Sine function input or 3: Formula input.
The conditions shown in Example 2 are used below as input examples. Note that MAT_ID is as shown in Fig. 1.
Sine function input: INPUT_TYPE=2
For sine function input, use equation (1) or (2). Equations (1) and (2) show only odd-order components, but even-order components are also supported as input.
First, input the sine function. Input NO_ORDERS for the number of harmonic orders, NO_POLES for the number of poles m, and ANGLE(deg) for the reference angle θ0 in unit deg. Next, set the ORDER of the harmonic order k and the AMPLITUDE of its amplitude bk to the number of NO_ORDERS.
Then, enter the MAT_ID to assign the entered sine function, the COORD_ID for the coordinates defining the magnetization direction, and the reference magnetization
Radial orientation
Since a local cylindrical coordinate system is defined and used, COORD_ID=1 is specified for each MAT_ID and the reference magnetization of the local cylindrical coordinate system is entered as (MR, MT, MZ)=(1.0, 0.0, 0.0). Here, the same coordinate system is used for each MAT_ID, but a different coordinate system may be used for each. If MT≠0.0 or MZ≠0.0, you can set the reference magnetization vector in any direction in the cylindrical coordinate system.
Here, COORD_ID=1 for the local cylindrical coordinate system is defined in the COORDINATE setting as follows. TYPE=2 represents a cylindrical coordinate system, where EX_X=1 is defined to align the radial direction of angle zero in the local cylindrical coordinate system with the x-axis direction of the global Cartesian coordinate system.
Parallel orientation
Since the coordinate system to be defined is a Cartesian coordinate system, COORD_ID=0, which is the ID of the entire Cartesian coordinate system, is specified for each MAT_ID. For MAT_ID=101, where the magnetic pole center is the x-axis in the global Cartesian coordinate system, set x-axis positive magnetization vector M(x,y,z)=(1,0,0). For other MAT_ID=102, 103, and 104, set the magnetization direction vector to y-axis positive = (0,1,0), x-axis negative = (-1,0,0), and y-axis negative = (0,-1,0) for one round, respectively.
Mathematical formula input: INPUT_TYPE=3
In the formula input, each component MX, MY, and MZ of the magnetization M(x,y,z) is given by a formula. Please refer to “Appendix 1: Mathematical Input” in the EMSolution Handbook for details on functions that can be used in mathematical input.
In the case of formula input, the coordinate system defining magnetization and that of the magnet shape coincide, so it is possible to give magnetization distribution to a magnet of arbitrary shape. First, enter the magnetization distribution function. The formula to be entered here is the function including the reference magnetization
Radial orientation
Enter the magnetization of the local cylindrical coordinate system in the formulas. Note that MX and MY correspond to MR and MT, and y corresponds to
Parallel alignment
In order to have a distribution in the parallel direction, it is necessary to define the angle
Here, the overall Cartesian coordinates are used as the Cartesian coordinate system, resulting in different magnetization distributions for each MAT_ID. However, the same distribution function can be used for all MAT_IDs by defining the appropriate local Cartesian coordinates for each MAT_ID. If you want to give a magnetization distribution to a bar-shaped magnet, you can do so by using the Cartesian coordinate system and entering the magnetization distribution function as a function of x, y, z.
Download
・ input_radial_sin:
Input file with radial orientation, sine function input, maximum order 1.
(The condition of maximum order 5 is commented out.)
・ input_radial_eq:
Input file with radial orientation, mathematical input, maximum order 1.
・ input_parallel_sin:
Input file with parallel orientation, sine function input, maximum order 1.
・ input_parallel_eq:
Input file with parallel orientation, mathematical input, file with maximum order 1.
・ pre_geom.neu:2D mesh file
Analysis Examples by Functions
Iron loss, permanent magnets and laminated iron cores
- Iron loss calculation using half-cycle periodicity
- Analysis of laminated iron cores by homogenization method and output of magnetic flux density of iron section of laminated iron core
- Analysis using nonlinear two-dimensional anisotropic magnetic properties
- Magnetization input to MAGNET by function
- Iron loss calculation by post-processing
- Evaluation of the rate of decrease from the input magnetization to the operating point and permeance coefficient of permanent magnets
- Demagnetization analysis of permanent magnets
- Analysis considering temperature dependence of magnetization properties
©2020 Science Solutions International Laboratory, Inc.
All Rights reserved.