Electromagnetic field analysis software

Electromagnetic field analysis software
New functionality added to Dynamic module - Relative position dependence of mass and restart function -
- TOP >
- Analysis Examples by Functions (List) >
- New functionality added to Dynamic module – Relative position dependence of mass and restart function –
Summary
EMSolution uses a method that requires two mesh data (pre_geom, deform_mesh) to interpolate the nodal positions of the deformed air region during the deformation motion."Plunger motion analysis" and "Three-dimensional analysis of plunger-type electromagnets and hinged electromagnetic relays with deformation" The coupled analysis function with the equations of motion (Dynamic module) is provided, as shown in Figure 2. This function solves the equations of motion shown in the following equation, where the external force F(x, v) is also given by mathematical input. In addition, the spring constants can be given as table data dependent on relative position to simulate nonlinear springs. We are pleased to report that the relative position dependence can now be taken into account for masses as well, using table data. In addition, restarting when using the dynamic module is now supported. In addition, the viscosity coefficient (a constant proportional to velocity) can be input as relative position-dependent or velocity-dependent table data to simulate a nonlinear damper.
Explanation
1. Nonlinear characteristics of mass with respect to relative position
This function can be used when the mass varies with position. For example, a mover (armature) may move in two stages as shown in Fig. 1. The armature is divided into

Fig. 1 An example where mass is dependent on relative position
Here, the relative position means the distance from the reference position in the mesh deformation motion analysis. As shown in Fig. 1, when two objects collide, the velocity changes to conserve momentum, and this velocity change can also be taken into account in the analysis. An example analysis is presented using the model of "Plunger motion analysis" shown in Fig. 2.
Let us assume that there is a mechanism as shown in Fig. 1 at the root of the mover (outside the model domain) as a pseudo-motion, and analyze it as if the mass
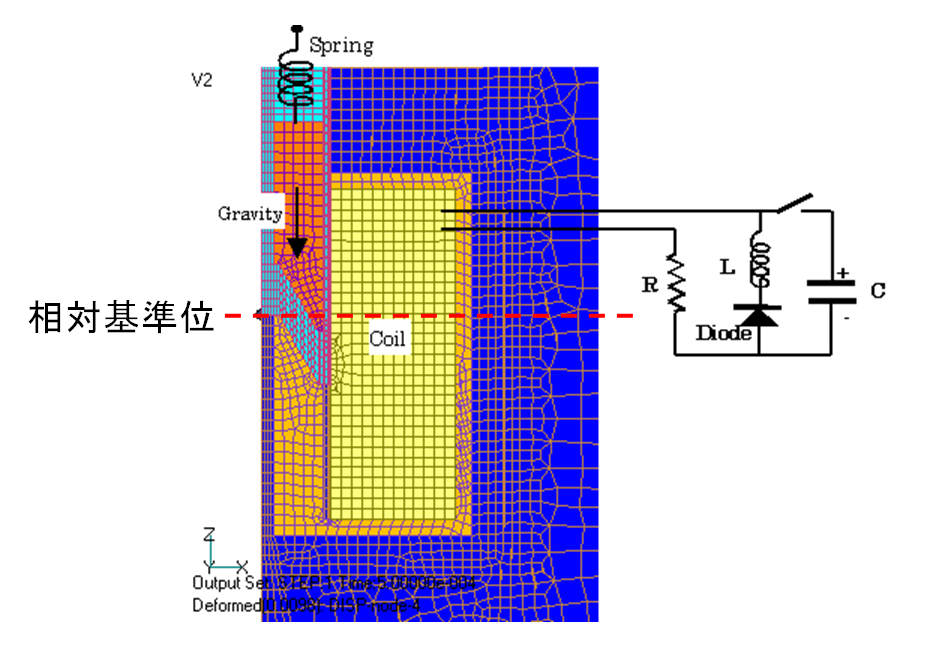
Fig.2 Plunger model
Fig. 3 shows the time variation graph of the relative position, Fig. 4 shows the velocity graph, and Fig. 5 shows the electromagnetic force graph. There are 4 cases of analysis: 1) with constant mass M (Linear M), 2) with constant mass 2M (Linear 2M), 3) with relative position dependence of mass with no velocity change due to collision (Nonlinear M), and 4) with velocity change considered and momentum conservation (Collision). The reference position for the relative position is set at the origin at the tip of the yoke core opposite the armature (the position where the armature and yoke core make contact), and the initial position is 12 mm above the origin. As a result, the motion of Nonlinear M is different from the results of M and 2M because the mass changes at a relative position of 5 mm, but the velocity changes continuously, whereas in Collision, the velocity changes at the time of collision, indicating that the motion is different from Nonlinear M.
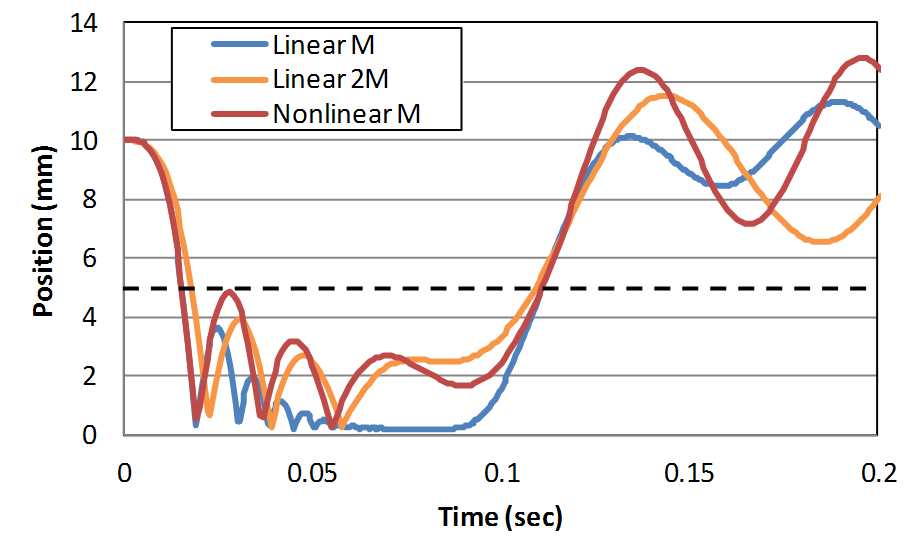
Fig.3 Comparison of time variation of relative positions

Fig.4 Comparison of time variation of velocity

Fig.5 Comparison of time variation of electromagnetic force
2. Restart function
Next, the restart function is described. To perform a restart calculation, rename the solutions file to the old_solutions file and the motion file to the old_motion file, as in the normal case. The motion file contains the relative position (POSITION), velocity (VELOCITY), and electromagnetic force (MAG_FORCE) at each time point in text format. The restart input settings are the same as in the normal case. Fig. 6 shows a time variation graph of the relative position analyzed by restarting from 0.1 second in the previous Nonlinear M calculation, together with the original analysis results. It can be seen that they are in agreement.
The relative position-dependent function of mass and the restart function are explained. We hope this will be helpful in your design.

Fig.6 Time variation of relative position (Restart calculation results)
How to use
1. Relative position-dependent function of mass
Mass was entered as a positive value in MASS in the equation of motion input, but in this case it is entered as a negative value and table data is entered in the columns that follow.
OPTION = 0: no velocity change due to mass change, = 1: velocity change due to mass change is considered in the analysis. In addition, external forces related to mass, such as gravity, could be entered as a constant value in CONST_FORCE, but if the mass varies with position, this cannot be simulated, so a new MASS_ACCELERATION option has been added. By entering a negative value for the acceleration of gravity, the gravity force can be calculated as an external force using the mass depending on the position. Note that MASS and CONST_FORCE are still applicable even when external forces are described by the MATH_EQ function, so it is recommended to use the MASS_ACCELERATION option when gravity is given as an external force.
When using a spring (SPRING)
2. restart function
To perform a restart calculation, rename the solutions file to the old_solutions file and the motion file to the old_motion file, as in the normal case. As in the normal case, enter the number of steps to be restarted in INITIAL_STEP and the time of the restart in INITIAL_TIME. Unlike the solutions file, the motion file is in text format, so the number of significant digits is the number of digits output in the file (the default number of significant digits is 6). If WIDE=1, the file can output 9 significant digits, so if you are concerned about the number of significant digits during post-processing or restarting, please use this function.
Download
Analysis Model
・ input_mass_table.ems : Input condition file for plunger model
(mass relative position dependent)
・ input_restart.ems :Restart analysis input condition file
・ pre_geom2D.neu :Mesh file
・ deform_mesh2D.neu :Control element file
Note : Mesh data is from "Plunger motion analysis".
Analysis Examples by Functions
Coupled equations of motion and external circuit systems
- Three-dimensional analysis of plunger-type electromagnets and hinged electromagnetic relays with deformation
- Reference position in mesh deformation motion analysis
- Improvement of deformation motion function
- Plunger motion analysis
- New functionality added to Dynamic module – Relative position dependence of mass and restart function –
©2020 Science Solutions International Laboratory, Inc.
All Rights reserved.