Electromagnetic field analysis software

Electromagnetic field analysis software
鎖交磁束ベースのモータビヘイビアモデル
- TOP >
- Analysis Examples by Functions (List) >
- 鎖交磁束ベースのモータビヘイビアモデル
概要
今や永久磁石同期モータ(PMSM)はその特性から家電用モータや車載用モータ等幅広く使用されています。PMSMは同期モータであるため,可変速運転を行うには制御が必須となり,その幅広い運転範囲に適した制御設計が求められています。制御回路設計は一般的にMATLAB/Simulink等のシミュレータが使用され,モータもモータ素子として回路内で使用されます。モータ素子には有限要素解析(FEA)結果をベースにしたビヘイビアモデルの使用が浸透しつつあり,より実機に近い振る舞いをする高精度なビヘイビアモデルが望まれています。ビヘイビアモデルはモデルベース開発(MBD)の1D-CAEとして活用できます。
ビヘイビアモデルの説明
ビヘイビアモデルとは,MATLAB/Simulink等で使用される非線形モータ素子を表します。高精度化を目的として,FEA結果をテーブルデータとして,モータ電圧方程式をベースとした非線形モータ素子内で使用する方法があります。代表的なものとして,以下があります。同期回転座標(dq座標)におけるモータの電圧方程式も併せて示します。
自己インダクタンスモデル
インダクタンスマトリックスモデル
鎖交磁束モデル
ここで,
非線形磁化特性を考慮する場合,鎖交磁束とインダクタンスは電流に依存することになります。加えて空間高調波(スロット高調波)も考慮する場合,回転角度に依存することになり,鎖交磁束とインダクタンスは
自己インダクタンスモデルとインダクタンスマトリックスモデルはその定義により,コイル鎖交磁束
使用例
鎖交磁束モデルを使用したビヘイビアモデルの妥当性検証例について紹介します。 ビヘイビアモデルとして以下の二つのモジュールを用意しています。
-
電圧型モジュール:電圧入力,電流出力
実機と同じモータモデルとして使用する場合,電圧型を使用することになります。インバータによる電圧を入力とし,電流を出力することができます。 -
電流型モジュール:電流入力,電圧出力
例えば電流ゼロを入力として強制回転させると無負荷誘起電圧を出力することができます。
どちらの型を使用した場合でも,トルクと鎖交磁束も出力します。
モデル化が正しければ,電圧型と電流型の結果は一致するはずですので,Fig.1に示す,電流と位相を指令値とする電流フィードバック制御に,電圧型(赤色)の電流出力を電流型(オレンジ)の電流入力としたモデルを使用します。電圧型にはPWM電圧が入力されます。モータモデルには電気学会ベンチマークモデル「D1モデル」を使用しています。
電流と電流進角を指令値とし,一定回転数を与えて解析します。

Fig.1 Simulink解析モデル
Fig.2に電圧型より出力されたコイル電流波形を示します。これが電流型に入力しています。Fig.3, 4に電圧型(Vgiven)と電流型(Igiven)で計算されたトルクとコイル鎖交磁束をそれぞれ示します。Fig.3, 4より,電圧型と電流型の結果は一致していることが確認できます。数値で比較しても誤差ともいえる小数点9桁目まで一致しています,これらより,鎖交磁束モデルによるモデル化誤差はないことが示せます。
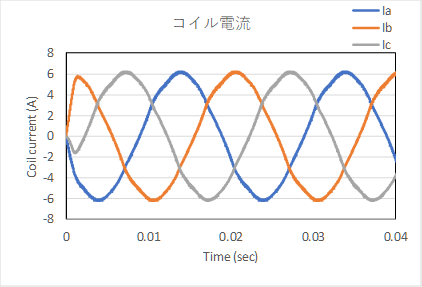
Fig.2 コイル電流波形

Fig.3 トルク波形の比較
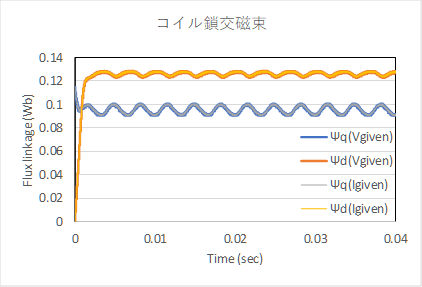
Fig.4 鎖交磁束の比較
簡単ですが,鎖交磁束モデルによるビヘイビアモデルについて紹介しました。電圧型は実機モータと同じ用途ですので,HILS等のリアルタイムシミュレータに使用されることが考えられます。電流型はFig.1のように制御ブロックと同様の振る舞いをしますので,制御ブロック内に組み込むことが検討されつつあります。今後さらに適用範囲を拡張してく予定です。ご興味のある方には試用版を提供しますので,ご検討頂けますと幸いです。
参考文献
H. Kaimori, K. Akatsu, ” Behavior Modeling of Permanent Magnet Synchronous Motors Using Flux Linkages for Coupling with Circuit Simulation”, IEEJ Ind. Appl. Vol7, No.1, pp.56-63 (2018).
Analysis Examples by Functions
Coupled with external circuit system
- Example of Periodic Current Change Input of Constant-current Power Supply
- NETWORK and CIRCUIT settings in a three-phase circuit
- Transformer Analysis
- Improvement of Power Supply Input Method
- Time-dependent variable resistance elements
- Y-connection and
- NETWORK Nonlinear Element Table Entry
- REGION_FACTOR and series and parallel circuits in EMSolution
- Coupled analysis with MATLAB/Simulink
- 鎖交磁束ベースのモータビヘイビアモデル
©2020 Science Solutions International Laboratory, Inc.
All Rights reserved.